

▲ 实验电路板
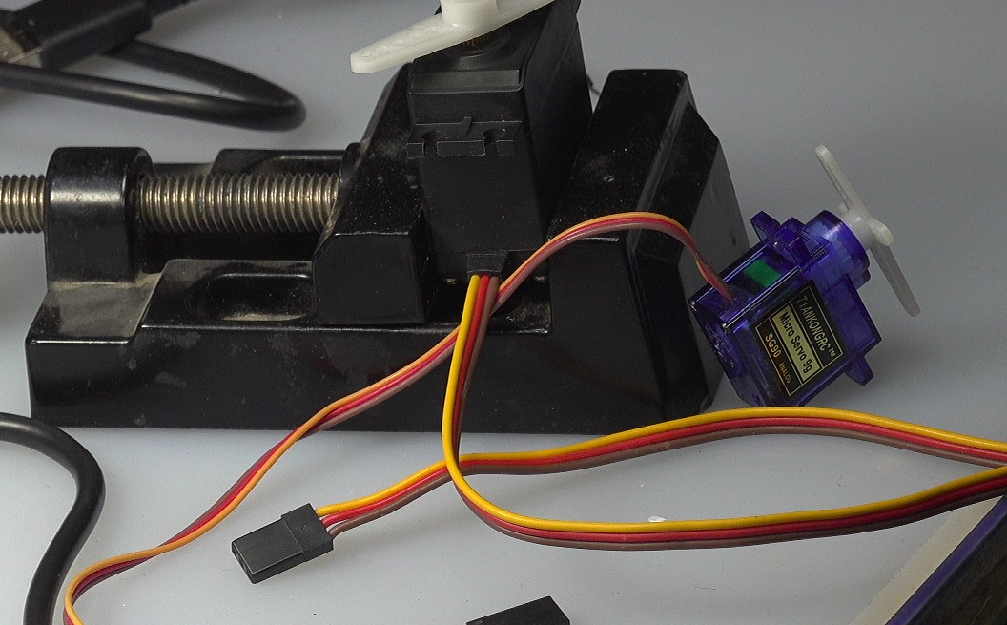
在 RASPBERRY PI PICO 开发板 基础测试[1] 给出了对PI Pico开发板的基本设置,通过 安装Thonny开发环境[2] 可以方便对Pi Pico进行初步的开发。 ▲ Pi Pico电路板的正反面 本文下面根据 Raspberry Pi Pico Python SDK[3] 中给的示例,对PI Pico的一些基本模块进行测试。 关于Pi Pico的管脚配置,可以参见 Pi Pico数据手册[4] 中给出的Pi Pico管脚图定义: ▲ Pi Pico管脚功能定义图 更多PiPico的资料可以从:Pi Pico官方网站[5] 获得。 ▲ 测试Pin(0) ▲ 测量Pin(0)的波形 通过ADC通道4,读取芯片内部温度。在此过程中,使用手触摸Pi Pico表面加热,或者使用酒精喷洒芯片表面进行降温。 ▲ 读取芯片内部的温度 ▲ 显示读取的温度值 ▲ 读取的温度数值变化 控制板载LED的波形是PWM运行。 PWM是软件PWM,它可以设置在任意管脚上。初步测试过Pin0, 15, 16等等。都具有相类似波形。 ▲ Pin25(驱动LED)的波形变化 ▲ LED亮度变化 舵机使用频率为50Hz,脉冲宽度cs 1.0 ~ 2.0ms的脉冲作为控制信号。下面是产生基本舵机位置中间时的输出控制脉冲。 舵机具有三个接线: ▲ 舵机及其接口 计算Duty_16公式为: 对应脉冲宽度与duty_u16之间的关系: ▲ 输出50Hz,1.5ms脉冲宽度 ▲ 变化的PWM波形驱动舵机旋转 使用电位器将改变的电压引入ADC(0),由单片机获得对应的ADC数值,改变PWM输出,使其输出的时间宽度从1ms等比例变化到2ms。 ▲ 将电位器输入ADC(0) 可以看到舵机的输出角度随着电位器的改变而发生变化。 ▲ 旋转电位器改变舵机的角度 使用管脚PIN2的下降沿产生中断。示例程序如下: 使用跳线将PIN2接地。每一次等会触发中断发生一次。 ▲ 将PIN2接地可以看到触发了中断Raspberry PI Pico小型MCU模块,以其价格低廉,功能丰富,开发方便为很多非电子类专业的同学进行创意项目原型设计提供了方便的平台。下面的一些实验给CDIE课程设计同学们制作的一些基本演示实验。
▌01 PI Pico实验板


▌02 基本测试
1.Flash LED on board
from machine import Pin,Timer from time import sleep_us
led = Pin(25, Pin.OUT)
tim = Timer()
print("Flash LED.") def tick(timer): global led
led.toggle()
tim.init(freq=2, mode=Timer.PERIODIC, callback=tick)
2.UART
(1)测试程序
from machine import UART,Pin,Timer from time import sleep_us
uart = UART(0, baudrate=115200, tx=Pin(0), rx=Pin(1), bits=8, parity=None, stop=1)
led = Pin(25, Pin.OUT)
tim = Timer()
print("Send UART.") def tick(timer): global uart, led
led.toggle()
uart.write(b'\x55')
tim.init(freq=10, mode=Timer.PERIODIC, callback=tick)

3.ADC
import machine import utime
sensor_temp = machine.ADC(4)
conversion_factor = 3.3/(65535) while True:
read = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (read - 0.706) / 0.001721 print(temperature)
utime.sleep(2)

4.PWM
(1)PWM驱动LED
from machine import Pin,PWM import time
pwm = PWM(Pin(25))
pwm.freq(1000)
duty = 0 direction = 1 for _ in range(16*255):
duty += direction if duty > 255:
duty = 255 direction = -1 elif duty < 0:
duty = 0 direction = 1 pwm.duty_u16(duty*duty)
time.sleep(0.001)


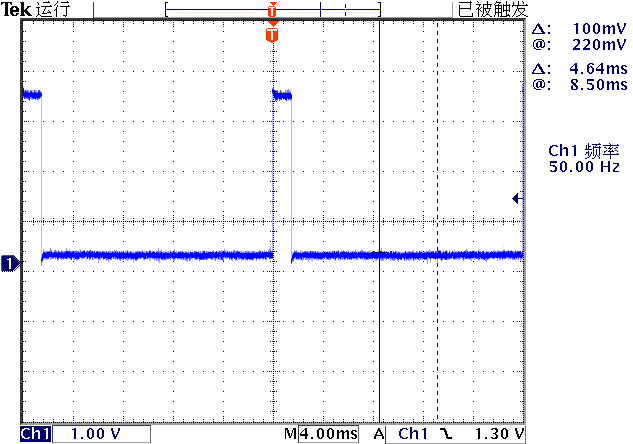
(2)PWM驱动舵机
from machine import Pin,PWM import time
pwm = PWM(Pin(15))
pwm.freq(50)
pwm.duty_u16(4915)
脉冲宽度(ms)
duty u16
1
3277
1.5
4915
2
6554

from machine import Pin,PWM import time
pwm = PWM(Pin(16))
pwm.freq(50) for _ in range(100):
pwm.duty_u16(3276)
print("Out pulse width : 1ms")
time.sleep(1)
print("Out pulse with : 2ms.")
pwm.duty_u16(6553)
time.sleep(1)
(3)PWM+ADC实验

from machine import Pin,PWM import time
pwm = PWM(Pin(16))
pwm.freq(50)
control = machine.ADC(0) for _ in range(1000):
adc = control.read_u16()
duty = int(adc * (6553-3276)/0xffff) + 3276 pwm.duty_u16(duty)
time.sleep(0.1)
5.中断IRQ
from machine import Pin
p2 = Pin(2, Pin.IN, Pin.PULL_UP)
p2.irq(lambda pin:print("IRQ with flag:",
pin.irq().flags()),
Pin.IRQ_FALLING)



 吉公网安备 22020302000206号
吉公网安备 22020302000206号