
一、什么是卡尔曼滤波?

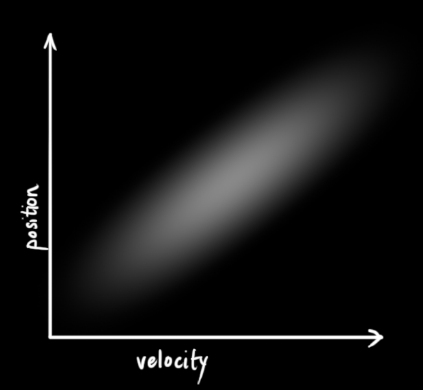
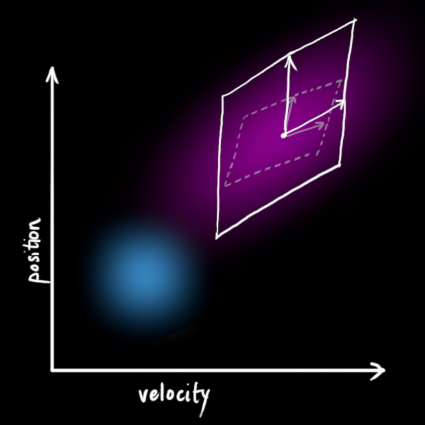
 ,表示位置和速度:
,表示位置和速度:

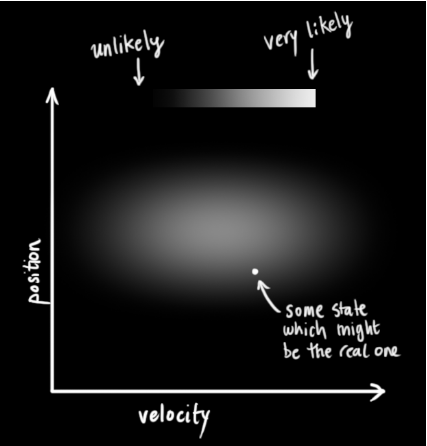
 ,表示不确定性。
,表示不确定性。
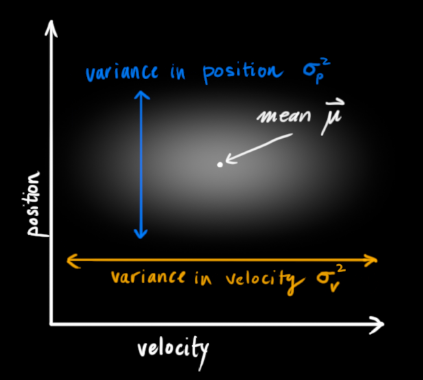
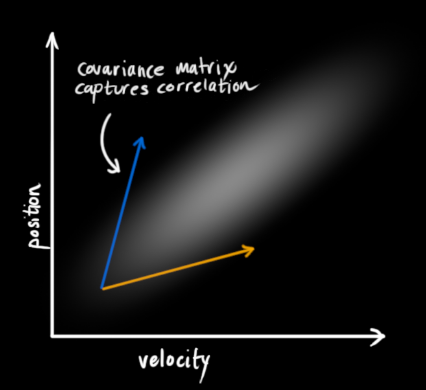
 表示第 i 个和第 j 个状态变量之间的相关度。(你可能已经猜到协方差矩阵是一个对称矩阵,这意味着可以任意交换 i 和 j)。协方差矩阵通常用“
表示第 i 个和第 j 个状态变量之间的相关度。(你可能已经猜到协方差矩阵是一个对称矩阵,这意味着可以任意交换 i 和 j)。协方差矩阵通常用“ ”来表示,其中的元素则表示为“
”来表示,其中的元素则表示为“ ”。
”。
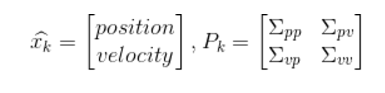
 (即均值,其它地方常用 μ 表示),以及协方差矩阵
(即均值,其它地方常用 μ 表示),以及协方差矩阵 。
。
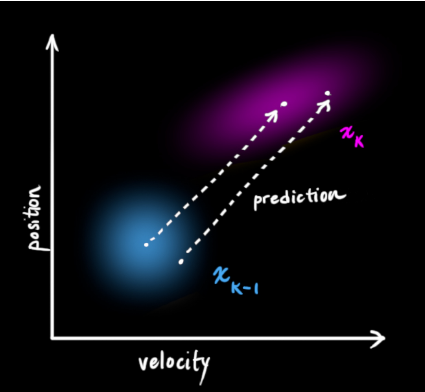
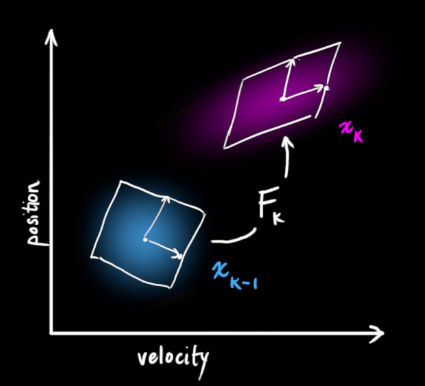
 来表示这个预测过程:
来表示这个预测过程:
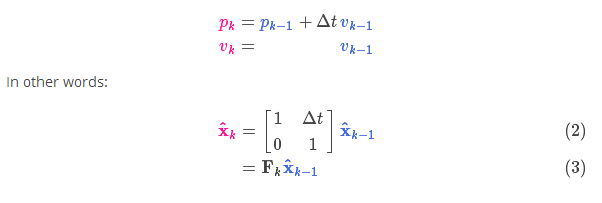
 会怎样变化呢?很简单,下面给出公式:
会怎样变化呢?很简单,下面给出公式:


 来表示,将它加到我们的预测方程中做修正。
来表示,将它加到我们的预测方程中做修正。
 ,根据基本的运动学方程可以得到:
,根据基本的运动学方程可以得到:


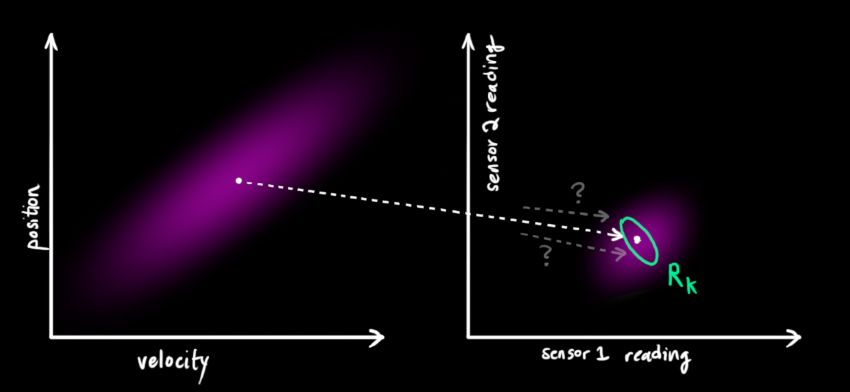
 称为控制矩阵,称为控制向量(对于没有外部控制的简单系统来说,这部分可以忽略)。让我们再思考一下,如果我们的预测并不是100%准确的,该怎么办呢?
称为控制矩阵,称为控制向量(对于没有外部控制的简单系统来说,这部分可以忽略)。让我们再思考一下,如果我们的预测并不是100%准确的,该怎么办呢?
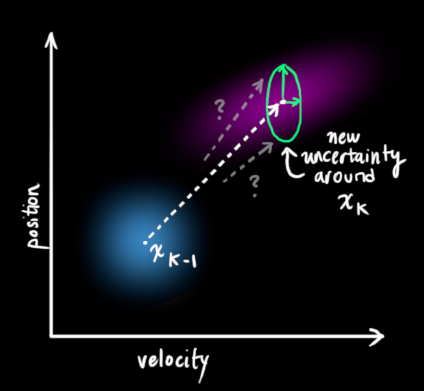
 的每个状态变量移动到了一个新的服从高斯分布的区域,协方差为
的每个状态变量移动到了一个新的服从高斯分布的区域,协方差为 。换句话说就是,我们将这些没有被跟踪的干扰当作协方差为的噪声来处理。
。换句话说就是,我们将这些没有被跟踪的干扰当作协方差为的噪声来处理。
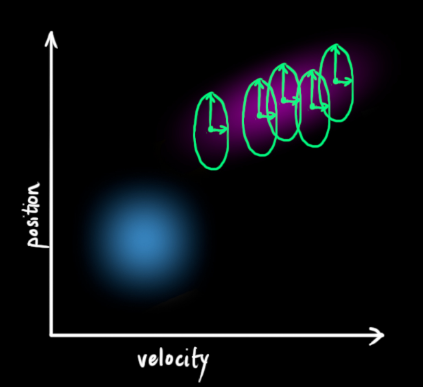
得到扩展的协方差,下面给出预测步骤的完整表达式:

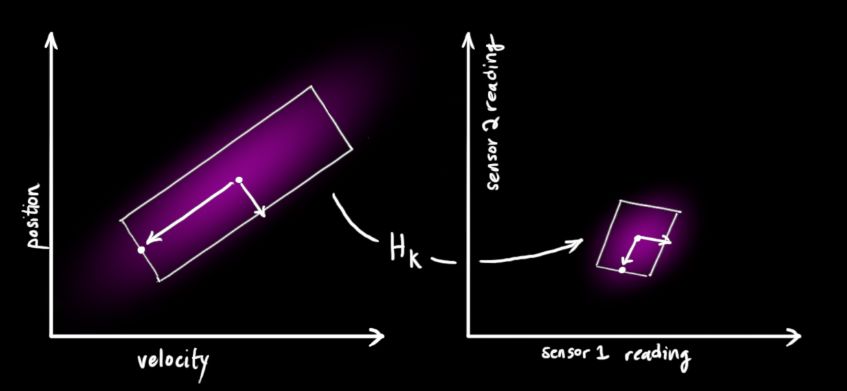
 和
和 来表示。如果再结合传感器的数据会怎样呢?
来表示。如果再结合传感器的数据会怎样呢?
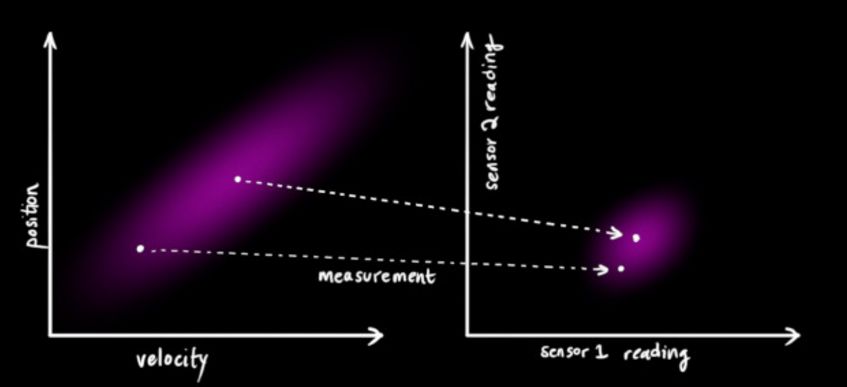
 来表示传感器的数据。
来表示传感器的数据。

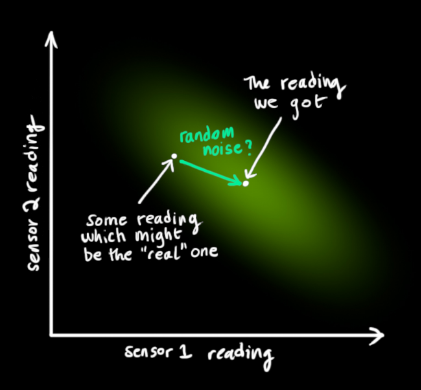
 表示,该分布的均值就是我们读取到的传感器数据,称之为
表示,该分布的均值就是我们读取到的传感器数据,称之为 。
。
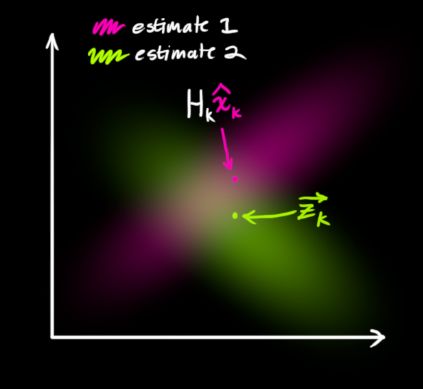
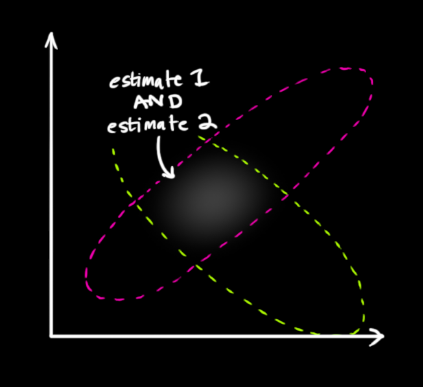
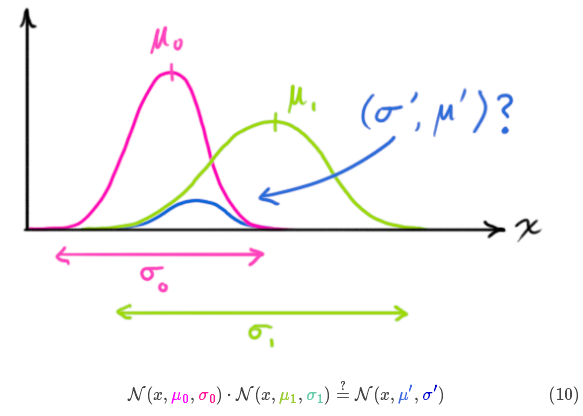
 ,有两种情况:(1)传感器的测量值;(2)由前一状态得到的预测值。如果我们想知道这两种情况都可能发生的概率,将这两个高斯分布相乘就可以了。
,有两种情况:(1)传感器的测量值;(2)由前一状态得到的预测值。如果我们想知道这两种情况都可能发生的概率,将这两个高斯分布相乘就可以了。
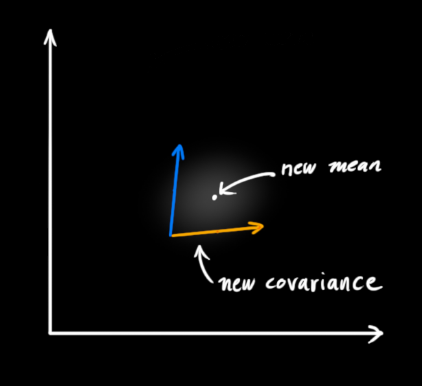
 和 μ 的高斯曲线可以用下式表示:
和 μ 的高斯曲线可以用下式表示:

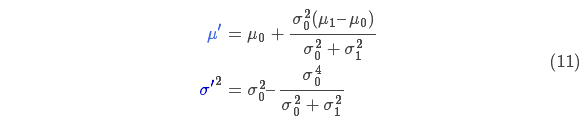
 表示每个维度的均值,则:
表示每个维度的均值,则:
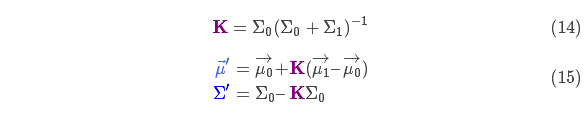
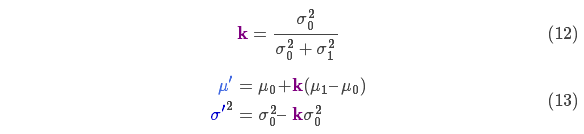
 称为卡尔曼增益,下面将会用到。放松!我们快要完成了!
称为卡尔曼增益,下面将会用到。放松!我们快要完成了!
 ,和测量部分
,和测量部分 ,将它们放到式(15)中算出它们之间的重叠部分:
,将它们放到式(15)中算出它们之间的重叠部分:


里面包含了 )将其约掉,再将式(16)的第二个等式两边同时右乘矩阵
)将其约掉,再将式(16)的第二个等式两边同时右乘矩阵 的逆得到以下等式:
的逆得到以下等式:

 就是新的最优估计,我们可以将它和
就是新的最优估计,我们可以将它和 放到下一个预测和更新方程中不断迭代。
放到下一个预测和更新方程中不断迭代。


 吉公网安备 22020302000206号
吉公网安备 22020302000206号